参加了老师的一个项目,要搞劣质数据对机器学习算法的影响,我负责实现DBSCAN算法。
定义
参数
ε(eps):邻域半径
minPts:形成核心点最少的点数
距离
在二维(每个数据只有两个属性)的情况下,使用欧氏距离(sqrt(x^2+y^2))就可以有很好的效果,但对于更高维度的数据,欧氏距离是不适用的。
点的可达性
如果点p在距离ε内有至少minPts个点,则点p被称为核心点(core point),p距离ε内的其他点被称为p的直接可达点(directly density-reachable point)。
对于点p和q,如果存在一个序列{p1,p2,…,pn},其中p1=p,pn=1,满足∀i∈N,i<n有pi+1是pi的直接可达点,则称q为p的可达点(density-reachable point)。
对于点p和q,如果存在点o,p和q都是o的可达点,则称p和q是密度连接(density-connected)的。
如果点p不是任何点的可达点,则称p为局外点。
聚类
一个聚类满足如下性质:
1.聚类中的任意两个点都是密度连接的。
2.聚类中的任意点的可达点仍属于这个聚类。
算法
①对于每一个点,判断其是否为核心点
②新建一个聚类cluster
③找到一个没有被访问的点,放入cluster。如果所有店都被访问,则程序结束。
④根据cluster中点的可达点进行搜索,将搜索到的未被访问的点放入cluster,并标记为已访问。
⑤重复②
代码
#include <vector>
#include <algorithm>
#include <fstream>
#include <iostream>
#define pointSet std::vector<point>
#define pointerSet std::vector<int>
#define NOT_VISTED -1
#define WRITE_TO_FILE
#define ATTRIBUTIONS 4
#define minPts 4
#define E 0.1
//it is actually squared e
class point {
public:
double a[ATTRIBUTIONS];
int ddr;//amount of directly density-reachable points
int flag;
int flag_ans;
pointerSet *ddrs;
point(double *attributions, int flag_ans) {
for (int i = 0; i < ATTRIBUTIONS; ++i) {
a[i] = attributions[i];
}
ddr = 0;
ddrs = NULL;
flag = NOT_VISTED;
this->flag_ans = flag_ans;
}
double distance(const point &p0) {
double sum = 0;
for (int i = 0; i < ATTRIBUTIONS; ++i) {
sum += (a[i] - p0.a[i])*(a[i] - p0.a[i]);
}
return sum;//there is no sqrt() because E have been squared
}
bool operator < (const point &p0) {
for (int i = 0; i < ATTRIBUTIONS; ++i) {
if (a[i] < p0.a[i]) return true;
else if (a[i] > p0.a[i]) return false;
}
return false;
}
};
class DBSCAN {
public:
DBSCAN(std::string file) {
std::ifstream fin(file);
fin >> N;
for (int i = 0; i < N; ++i) {
double attributions[ATTRIBUTIONS];
int flag;
for (int i = 0; i < ATTRIBUTIONS; ++i) {
fin >> attributions[i];
}
fin >> flag;
points.push_back(point(attributions, flag));
}
fin.close();
}
//To calcute ddr(amount directly density-reachable points) of every point and save ddrs(directly density-reachable points) for each CORE points
void calcDdr(void) {
for (int i = 0; i < N; i++) {
pointerSet *p = new pointerSet;
for (int j = 0; j < N; j++) {
if (i == j) continue;
if (points[i].distance(points[j]) < E) {
points[i].ddr++;
p->push_back(j);
}
}
if (points[i].ddr >= minPts) {
points[i].ddrs = p;
}
else {
delete p;//if point i is not a core point, we need not to know its directly density-reachable points
}
}
}
void DFS(int x, int flag) {
point &p = points[x];
p.flag = flag;
for (int i = 0; i < p.ddrs->size(); ++i) {
if (points[p.ddrs->at(i)].flag == NOT_VISTED) {
points[p.ddrs->at(i)].flag = flag;
if (points[p.ddrs->at(i)].ddr >= minPts) DFS(p.ddrs->at(i), flag);
}
}
}
void process(void) {
calcDdr();
int flag = 0;
for (int i = 0; i < N; ++i) {
if (points[i].flag == NOT_VISTED && points[i].ddr >= minPts) {
DFS(i, flag++);
}
}
#ifdef WRITE_TO_FILE
std::ofstream fout("output.txt");
for (int i = 0; i < N; ++i) {
for (int j = 0; j < ATTRIBUTIONS; ++j) {
fout << points[i].a[j] << '\t';
}
fout << points[i].flag << '\t' << points[i].flag_ans << std::endl;
}
fout.close();
#else
for (int i = 0; i < N; ++i) {
for (int j = 0; j < ATTRIBUTIONS; ++j) {
std::cout << points[i].a[j] << ' ';
}
std::cout << points[i].flag << std::endl;
}
#endif
}
private:
int N;
pointSet points;
};
int main()
{
DBSCAN dbscan = DBSCAN("input.txt");
dbscan.process();
system("pause");
return 0;
}
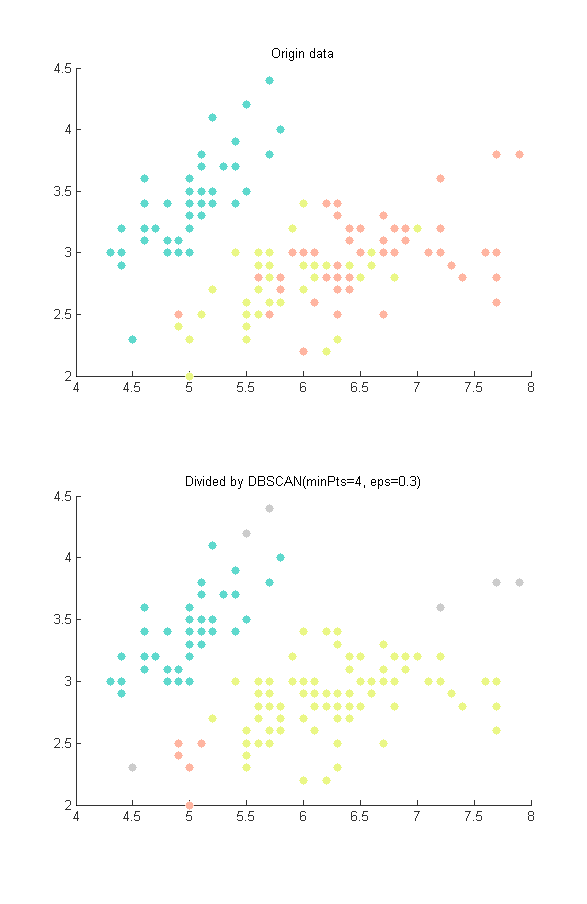
效果
二维的情况,看起来聚类的结果还是很好的,由于只使用了四个属性中的两个,所以没有将原始数据的三个集合给区分出来,但明显能看出来将相近的点分成了同样的颜色(灰色代表噪声)。
但在高维数据上,使用欧氏距离计算密度的DBSCAN的效果就不是很好了,甚至可以说非常不好,例如我用的iris数据,如果将四个属性全用上,则不管怎么调整参数,都无法大致将数据分成三类,虽然四维图像无法显示,但从输出来看,结果跟上图是差不多了,有两类无法分开。