前言
很久以前就知道LEGO-NXT可以解魔方,但网上最经典的解决方法需要用到RGB模块,这个模块在机器人套装中没有,单独购买还挺贵。除此之外,也能见到有些人用手机来识别魔方的颜色,但由于自己当时编程能力有限,也就没有去做。
在上一篇博文中,我学会了如何使用Python来控制NXT。有了Python之后,就感觉此事,有戏。因为有了Python作为桥梁,大多数问题都可以同过import来解决😂。
进入正文之前,首先看一下最终效果
这篇文章旨在向同样想使用NXT解魔方的人提供一些思路和方法,不会特别全面。
如果大家遇到了其他的问题或想要知道更多的细节,欢迎留言告知。
准备工作
NXT机器人
机器人最大的作用是拧魔方,还有一个附带的作用是展示魔方的每一面,以方便识别颜色。
我直接使用了MindCuber for LEGO MINDSTORMS NXT 2.0的设计,这个设计十分巧妙且经典,用两个电机就能完成魔方的所有操作。不过,由于我们并不打算使用RGB感应器来识别颜色,因此右侧那一坨(最右侧的电机及以上)不需要安装。如果像我一样比较懒,超声波部分也不需要安装。
我拥有的是LEGO 9797+9695,这里面有的部件数量不满足MindCuber for LEGO MINDSTORMS NXT 2.0的要求,所有拼的时候灵活一些,遇见不够了就拿别的代替就好了。
提示:尽量多代替底部支架部分,少代替顶部的机械臂。
手机
手机需要安装一个叫IP Webcam的APP,免费的版本就可以。
打开软件后滑到最底部点击start server,则软件开始运行,屏幕下方会显示服务器的地址即端口号,例如我的是192.168.0.101:8080,此时,使用电脑(同一个子网,或者说路由器内)浏览器访问网址
地址:端口号/shot.jpg
(例如192.168.0.101:8080/shot.jpg)
如果显示出了手机及时拍摄的照片,则说明手机部分没有问题。
Python
推荐使用Python2.7。如果使用其他版本,主要的阻碍在nxt-python,如果其能够正常工作,则其他的问题应该不难解决。下面是一些包
nxt-python
通过这个包控制NXT机器人。安装方法见使用python控制LEGO-NXT(Win10)。
urllib
通过这个包来访问手机上的IP WebCame,Python2.7已内置。
opencv && numpy
处理图像难免会用到的两个包。
opencv在这个网站找到想要的版本,下载whl文件,之后执行pip install xxx.whl即可。
numpy已经安装太久记不清,估计直接pip install numpy就行。
kociemba
这个包用来计算魔方的解法,可以不用或换别的。安装的时候一定要按照Github主页的教程来,特别提醒需要先安装Installation后半部分的build tools,再执行pip安装。
编程
如果前面的准备工作都已经完成,则你将完全可以使用不超过300行的代码,使NXT机器人成功还原魔方!
下面将分为3个部分给出编程的思路及提示。
NXT机器人
机器人部分的编程就是控制电机,拧魔方。
具体到MindCuber for LEGO MINDSTORMS NXT 2.0而言,就是控制两个电机。其中底部的电机比较简单,电机上和底座上的齿轮分别由12齿和36齿,也就是3:1的转速,因此如果想要魔方旋转90度,则需要电机(反方向)旋转270度。
我们可以使用如下的方式旋转
brick = nxt.locator.find_one_brick(name='NXT')
base = Motor(brick, PORT_A)
base.turn(50, 270)
这个写法会使PORT_A连接的电机以50的正向速度旋转270度。如果想要反向旋转,则应该把速度改为-50,而非角度改为-270。
不过,使用这个方法进行旋转并不是十分精确,可能会有几度的偏差,如果多旋转几次,偏差可能会越来越大。不过,NXT的电机还有读取角度的功能,这样,我们就可以不使用相对角度,转而使用绝对角度。即记录一个变量now_degree,表示电机应该处在的角度,然后通过它与电机实际读数的差值进行旋转。例如,第一次旋转270度,实际上转了275度,第二次又要转270度,经过计算,now_degree应该是540度,差值为265度,则这次只需要转265度就行了。这样子偏差始终都能在一个可控范围。
除了底部,还有一个控制机械臂的电机,这个电机主要在三个角度之间来回切换,仍然推荐使用绝对角度,角度值可以自己试出来。如果不知道机械臂的三种状态长什么样子,可以看MindCuber for LEGO MINDSTORMS NXT 2.0网站上的视频。
在基础的旋转搞定之后,推荐将机器人封装成五种(或以上)操作,这样后面的编程就不用再思考这里的细节了。
| 名称 | 具体操作 |
|---|---|
| 翻转 | 对应机械臂的两步操作 |
| 整体旋转(顺时针) | 机械臂抬起,底座旋转 |
| 整体旋转(逆时针) | 机械臂抬起,底座旋转 |
| 单面旋转(顺时针) | 机械臂放下,底座旋转 |
| 单面旋转(逆时针) | 机械臂放下,底座旋转 |
颜色获取
一些废话(可跳过)
书到用时方恨少,事非经过不知难
大家或许都看到过这样的图片,A和B区域的颜色其实是一样的。
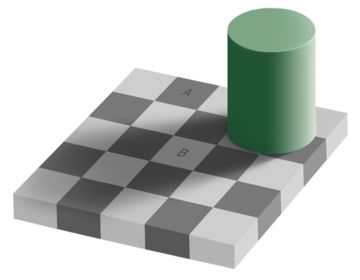
第一次看到这样的图片还觉得,人类果然还是没有机器客观准确啊。
但是,这次问题是反过来的,如果你要识别这个棋盘的颜色,拍照的时候因为有个圆柱挡了点光,然后电脑硬说A和B颜色一样,你就会发现电脑愚钝死板了!
在识别魔方颜色上我就遇到了这样的问题,最容易出问题的就是橙色和红色,在太阳光下还好,如果在台灯下,就会经常出现“远处深红近处橙”的现象。
由于图像方面我不甚了解,最终也没有太好的解决方法,只能是写了一个自动重设颜色的函数:按顺序把魔方的六种颜色放在魔方的同一个面里,然后拍一张照片计算颜色,并保存。
正文
颜色获取的第一步是定位,魔方每一面都有九个方块,我们需要先找到这九个方块在哪里。
我的思路非常简单粗暴,虽然每次拍摄魔方的位置都有些许变化,但大致位置相同,因此直接把位置写成固定的,然后等间隔地选取九个小方块即可。如图


当然,此时我们不能完全相信小方块中的所有颜色,或者它们的均值,因为有些像素是不属于魔方的。
如果我们事先知道魔方的六种颜色的rgb值,则可以设置一个阈值$\epsilon$,然后对每一种颜色计算距离小于$\epsilon$的像素的个数,哪种颜色多就认为是哪种颜色,写成优化问题就是
说起来复杂,其实计算起来一句话就搞定,$\epsilon$大概设50左右,可以多试试调整,下面这句话,可以计算sub_window所有像素中与第m种颜色相近的个数。
np.sum(np.sum(np.power(sub_window - colors[m], 2), axis=2) < epsilon*epsilon)
至此,唯一的问题就变成了如何事先知道六种颜色的rgb值。由于我们这种方法非常受光线的影响,可能下午三点的rgb值到了下午五点就不好用了,因此我们需要一个快捷的获取六种rgb值的方法。
我的做法是把魔方的六种颜色按照固定顺序展示在同一面上,然后尽量摆正,让小方块里全是同一种颜色,然后写一个代码自动获取六种颜色的均值,并存储即可,如图

获取到的颜色为
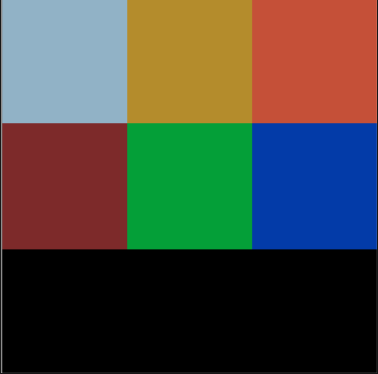
可以看出,这次获取到的颜色已经与之前有不同了。接下来使用np.save将六种颜色保存起来即可。
魔方朝向
除了NXT机器人和颜色获取之外,再有值得一提的就是魔方朝向了。kociemba的输出是一个如下的字符串
F R' L' B' L' D' F U' D2 B2 R' U L2 U2 F2 B2 R2 B2 U2 B2 U'
六个子母分别代表六个面,正常是顺时针90度,带'是逆时针90度,带2是180度。
我们的机器人只能拧底下的面,因此如果需要拧别的面,就需要先把那一面挪到底下,这就要求机器人能够做到两件事:
- 时刻清楚每一面的位置
- 能够把任意一面挪到底下
对于第一件事,如果熟悉置换的概念,则不难实现,如果不熟悉,直接看下面的代码,应该也能理解
position = ['U', 'R', 'F', 'D', 'L', 'B'] # 初始朝向
position = [position[i] for i in [1, 3, 2, 4, 0, 5]] # 机械臂翻转魔方时调整朝向
至于URFDLB这个顺序,以及他们的具体意义,可以参考下图
|************|
|*U1**U2**U3*|
|************|
|*U4**U5**U6*|
|************|
|*U7**U8**U9*|
|************|
************|************|************|************
*L1**L2**L3*|*F1**F2**F3*|*R1**R2**R3*|*B1**B2**B3*
************|************|************|************
*L4**L5**L6*|*F4**F5**F6*|*R4**R5**R6*|*B4**B5**B6*
************|************|************|************
*L7**L8**L9*|*F7**F8**F9*|*R7**R8**R9*|*B7**B8**B9*
************|************|************|************
|************|
|*D1**D2**D3*|
|************|
|*D4**D5**D6*|
|************|
|*D7**D8**D9*|
|************|
详情在kociemba的主页上。
对于第二件事,想要把某个面挪到底下,只要机器人能够知道这个面现在在哪,则挪过去的动作可以提前写好,一共才六种情况。
示例代码
motors.py是里面实现了控制机器人所需的方法,目前托管在GitHub Gist上。
我没有将所有代码直接放在一个github仓库内,是因为我的这份代码别人直接拿来是一定用不了的,尤其是图像的部分。当然,如果有人想要参考的话,也欢迎留言告诉我。